Design Review 2!
With less than 2 weeks before our final presentation, the Neato Street View team has come to a great stopping point, developing working MVPs for our major subsystems. Please have a look at our progress!
Web Application
- Basic Interface:
- Ability to click on waypoints in a SLAM map
- Pan the camera angle to view a 360 degree panorama
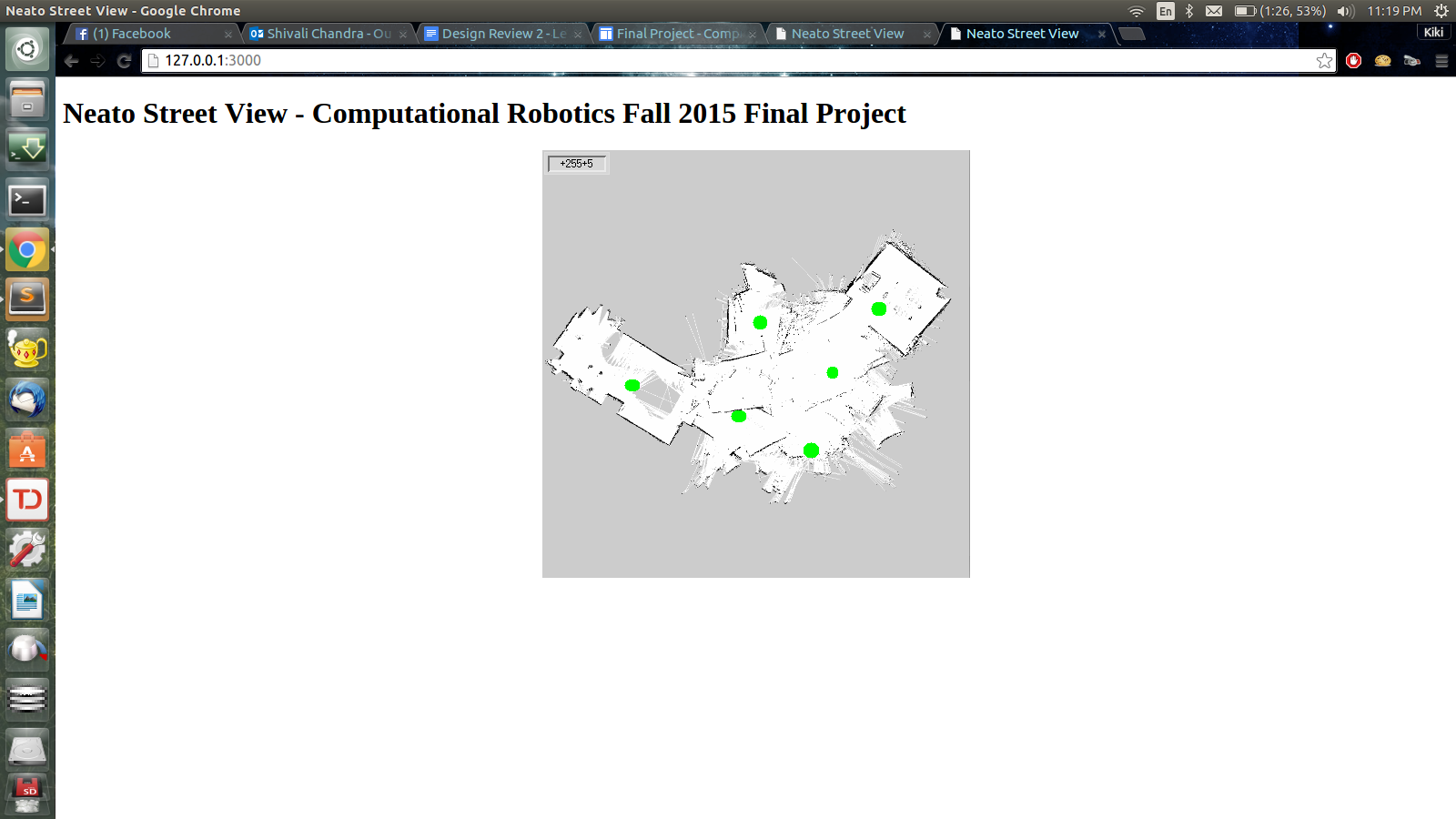
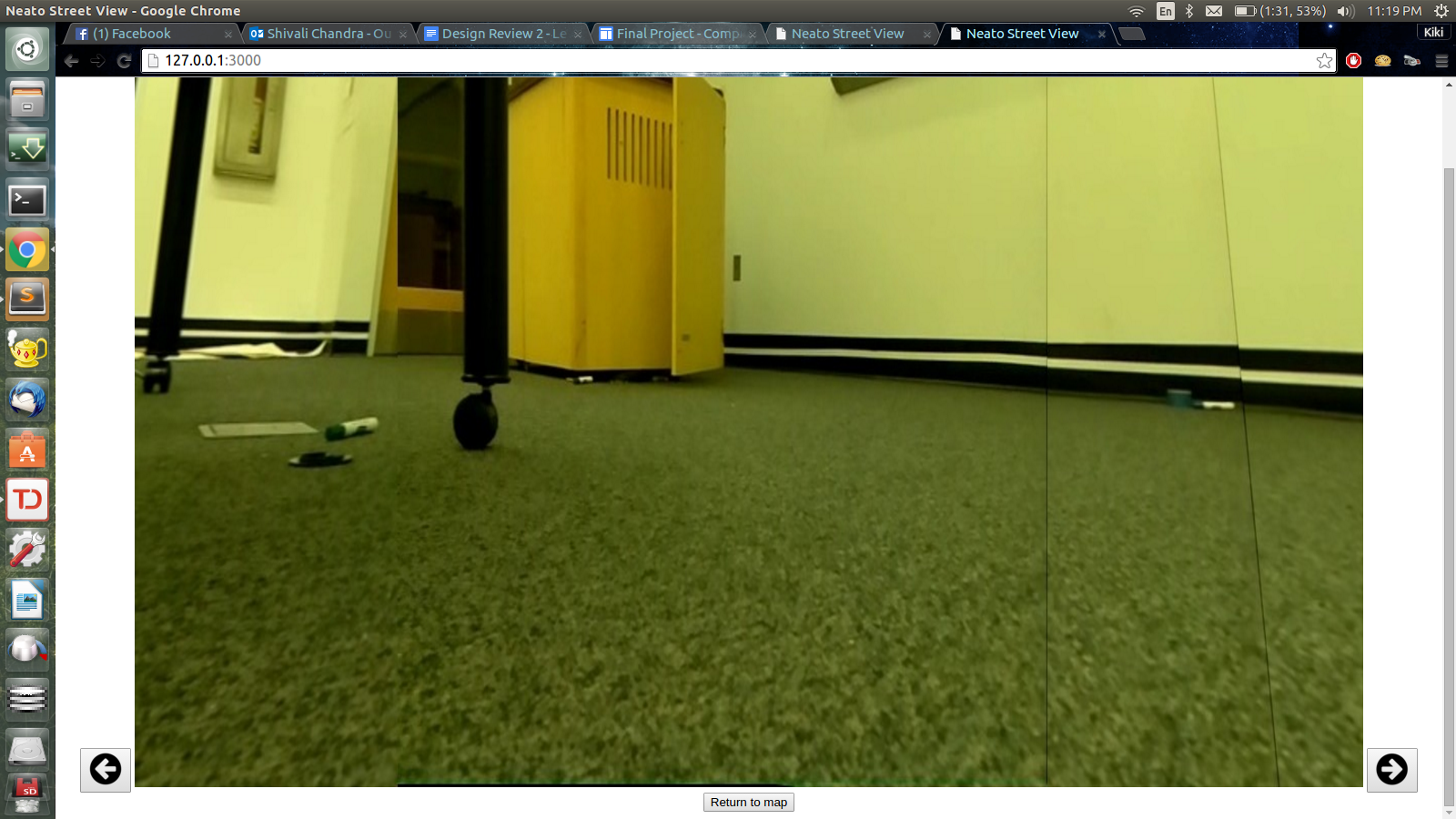 Figure 1: Web Application where 1) green dots represent clickable waypoints on the map and 2) arrow buttons control the camera angle of the 360 degree view point
Figure 1: Web Application where 1) green dots represent clickable waypoints on the map and 2) arrow buttons control the camera angle of the 360 degree view point
- Need to do:
- user interface, include depth perception
- take pics higher from ground in a better place (dining hall, outside of robo lab AC 2nd floor)
- capture photos using fisheye lense with camera calibration for undistorted, wide angle view
Collecting Panoramas + Waypoints
Collecting 360 degree views with a ROS Node
- Collect a total of
36photos - Take a snapshot every
10degrees of rotation - In order to get the widest range, we merge
5pictures, which are20degrees (2index difference *10degrees) apart from each other.
Improved Stitching Methods
We landed on an improved stitching method for generating panoramas which we call the Two Side Merge method. The effectiveness of this approach was generating panoramas that were balanced on the left and right side.
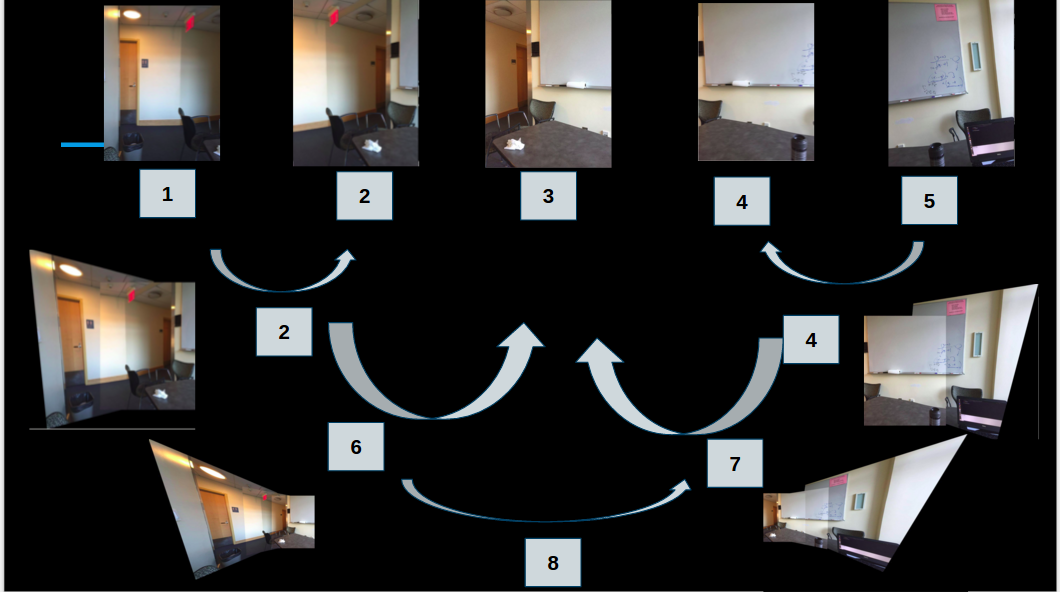 Figure 2: Illustration of the two side merge method
Figure 2: Illustration of the two side merge method
 Figure 3: Result of the two side merge method
Figure 3: Result of the two side merge method
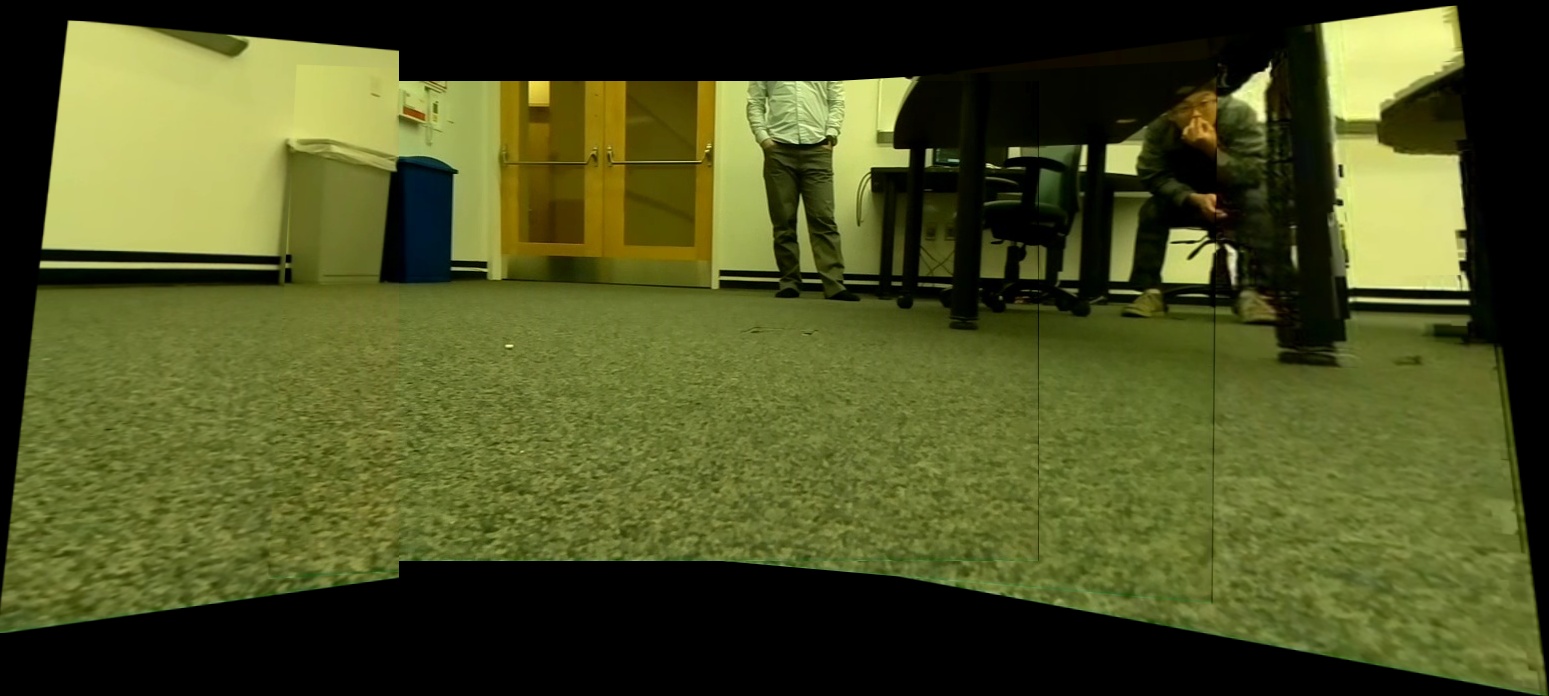 Figure 4: Applying the two side merge method to photos captured from the Neato
Figure 4: Applying the two side merge method to photos captured from the Neato
Comparison to Old Stitching Methods
Compare these results to our previous stitching methods. The panorama produced is subpar, as one side of the image is heavily warped.
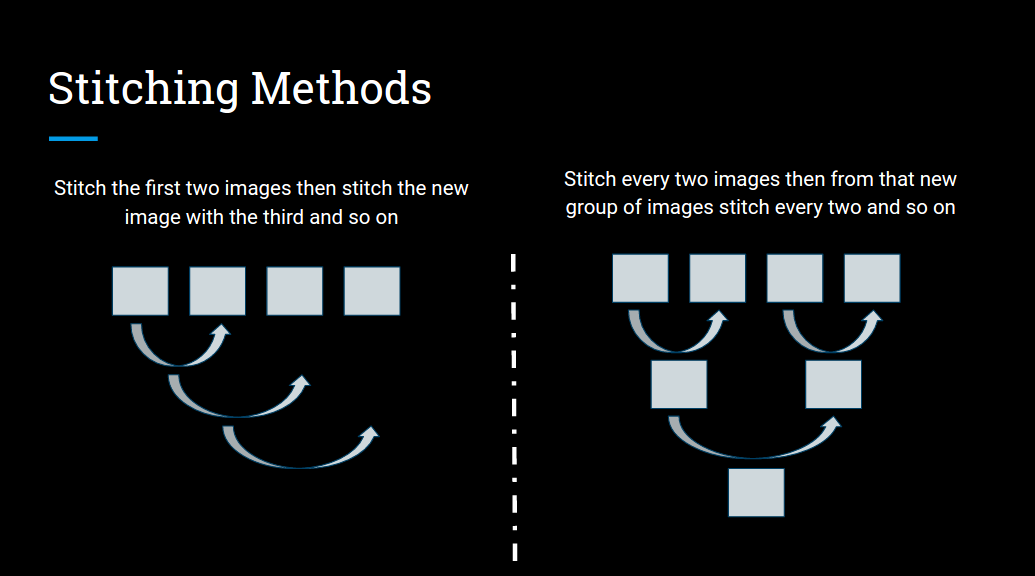 Figure 5: Old Methods of Stitching
Figure 5: Old Methods of Stitching
 Figure 6: Panoroma generated using the old method
Figure 6: Panoroma generated using the old method
Select from 36 Photos and Merge into Panorama
36photos representing the 360 degree view for a particular waypoint is saved in a unique folder
"images" : {
"raw" : {
"0.0,0.0,0.0" : [
"0.jpg",
"10.jpg",
(...),
"-20.jpg",
"-10.jpg"
],
"1.0,1.0,0.0" : [
"0.jpg",
"10.jpg",
(...),
"-20.jpg",
"-10.jpg"
]
}
}- starting with an incremented phase offset, the algorithm picks a photo every
20degrees (the difference) and merge5photos for one panorama. -
the incremented starting phase and fixed difference allow us to merge photos in many different combinations of 5 photos
-
Example of selecting photos for merging. In this example, the starting phase is
3and the index difference between photos in every combination is2.[3,5,7,9,11][6,8,10,12,14]
SQL Database
We updated the schema of our database to reflect the current method of generating a panorama for each waypoint pose x, y, and theta.
The paths to the final panoramas are stored in the local file system. The path is associated with a unique waypoint row in the database.
"images" : {
"final" : [
"x,y,theta_panorama.jpg",
...
]
}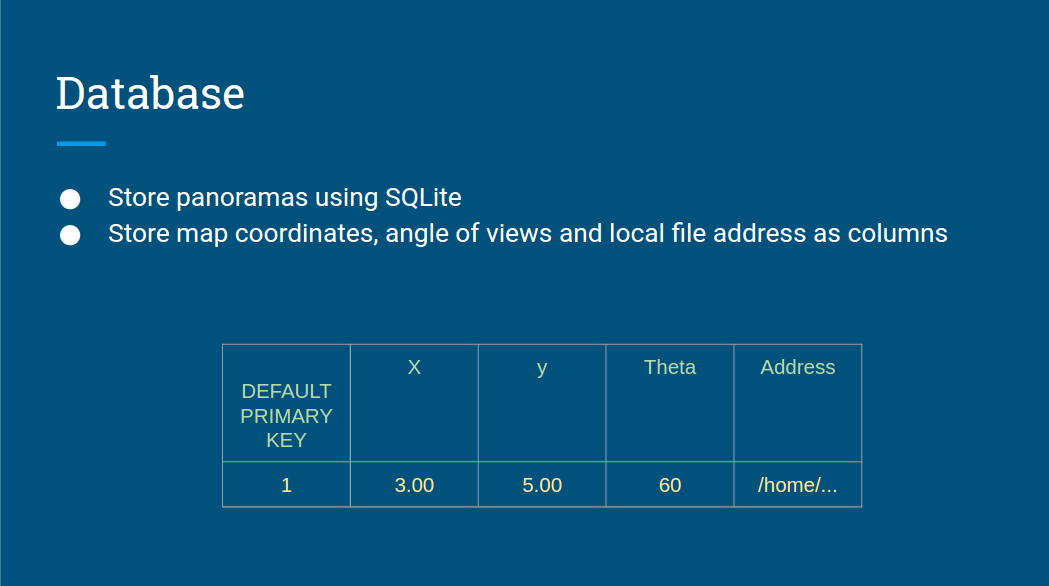 Figure 7: Final Panoromas are associated with their waypoints in the SQL database schema
Figure 7: Final Panoromas are associated with their waypoints in the SQL database schema
Learning SLAM using an existing C++ implementation
The Python Implementation of the SLAM algorithm, while high on our learning goals, was not an integral part of the eventual Neato Street View web app that we would demo. In fact, because we will not be implementing the entirity of SLAM in Python (only the important systems such as ScanMatcher), the SLAM algorithm that will be generating the maps will still be the original C++ Hector SLAM package. We are happily still pursuing the Python implementation for the sake of learning more about mobile robotics algorithms and C++.
The following summarizes our progress:
- [ DONE ] Serializing Input and Ouput Data of the C++
ScanMatcher::matchDatainto JSON format. This data serves as a ground truth to what the function should be taking in and returning out. - [ DONE ] Load JSON into Python successfully
- [ - - - - - ] Write Unit Testing Modules which feeds the serialized inputs as arguments to the Python function implementation and compares the function output to the matching serialized outputs
- [ - - - - - ] Implement SLAM components in Python, such as the equivalent of
ScanMatcher::matchDatain the C++hector_slammodule.
Check out some of the JSON _dataContainer.json and _io.json (input/output) files that were produced as a result of serializing the data from the ground truth implementation.
16bithash_dataContainer.json
{
"origo": [-1.016,0],
"size": 161,
"dataPoints": [
[13.244,3.65935e-05],
[12.6919,0.239308],
...
[11.8127,-0.897036],
[13.244,3.58995e-05]
]
}16bithash_io.json
{
"beginEstimateWorld" : [
1.26894,0.152306,-0.883637
],
"covMatrixIn" : [
15.6009,-0.675218,-35.5471,-0.675218,29.1469,-216.242,-35.5471,-216.242,6552.29
],
"maxIterations" : 3,
"beginEstimateMap" : [
524.689,513.523,-0.883637
],
"covMatrixOut" : [
18.1631,-0.14603,12.4166,-0.14603,32.7221,-129.747,12.4166,-129.747,2577.22
],
"newEstimateMap" : [
524.906,513.226,-0.918397
],
"newEstimateWorld" : [
1.29057,0.122601,-0.918397
]
}